

本文基于Cheng等2025年发表的《MSDF-TL: A transfer learning and physics-constrained multi-source data fusion framework for weld state prediction》展开深度解读,从研究背景、技术方法、学术创新、研究启发等维度拆解论文核心内容,提炼可复用的科研思路与技术方法,挖掘领域研究缺口,为智能焊接领域的课题研究提供参考。
【论文基础索引】
论文标题:MSDF-TL: A transfer learning and physics-constrained multi-source data fusion framework for weld state prediction(迁移学习与物理约束的多源数据融合框架MSDF-TL用于焊接状态预测)
核心作者:第一作者Shipeng Cheng(西安理工大学自动化与信息工程学院);通讯作者Rui Yu(西安理工大学自动化与信息工程学院,E-mail:105633@xaut.edu.cn)
发表期刊/会议:Journal of Manufacturing Processes
发表时间:2025
卷期/页码:154 (2025) 504–523
核心标签:Transfer learning,Multi-source heterogeneous data fusion,Physics-informed neural networks,Intelligent welding,Weld state prediction(迁移学习、多源异构数据融合、物理信息神经网络、智能焊接、焊接状态预测)
一、论文核心背景与问题
本模块严格基于论文引言与研究背景部分,梳理研究逻辑起点,明确行业/学术痛点、现有研究局限性、核心解决思路、核心效果与贡献四大核心内容。
(一)行业/学术核心痛点
气体钨极电弧焊(GTAW)是汽车制造、压力容器生产等高精度工业的核心焊接技术,但自动化GTAW系统依赖经验设定的固定轨迹和参数,缺乏对焊接过程的实时分析与控制能力,高精度焊接仍依赖人工;
背面熔宽是评价GTAW焊接质量的关键指标,但现有背面熔宽监测系统结构复杂,难以在实际生产中落地;
焊接过程是典型的非线性多物理场耦合过程(涉及热传导、流体流动、材料相变的复杂交互),传统线性数值模型无法精准表征其动态行为,且熔池成像存在弧光、噪声干扰等问题,增加了状态预测的难度。
(二)现有主流研究的进展与关键局限性
论文原文梳理了PINNs、深度学习、多源数据融合三类主流研究方向的进展,并指出其核心局限性:
物理信息神经网络(PINNs) :可将物理定律融入神经网络损失函数,提升模型可解释性,在焊接孔隙预测、疲劳寿命估计等任务中取得应用,但需要大量数值仿真数据预训练,训练周期长、计算成本高,实时性差,且难以将熔池的非线性耦合热流固现象有效编码到模型中;
单源/传统多模态深度学习模型:CNN/LSTM等网络可自动提取熔池图像的空间特征和传感信号的时间特征,但单源数据模型复杂度高、泛化能力不足;传统多模态模型(如MFCA-Net)仅关注模态内的特征交互,缺乏细粒度的跨模态融合能力,且多源数据易引入冗余信息,抵消多传感器的优势;
传统特征提取方法:依赖人工设计特征,受设计者经验和专业知识限制,易遗漏焊接过程的关键信息,且特征提取过程会增加系统复杂度,引入累积误差。
(三)论文提出的核心解决思路
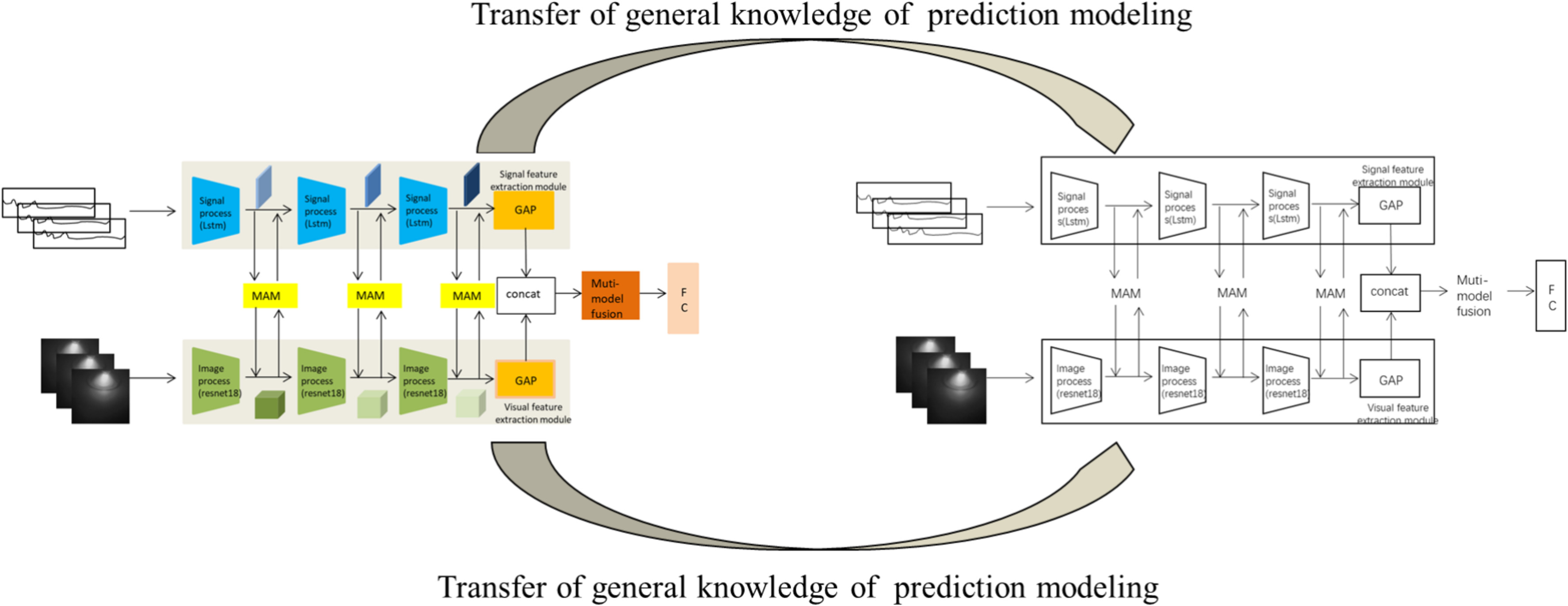
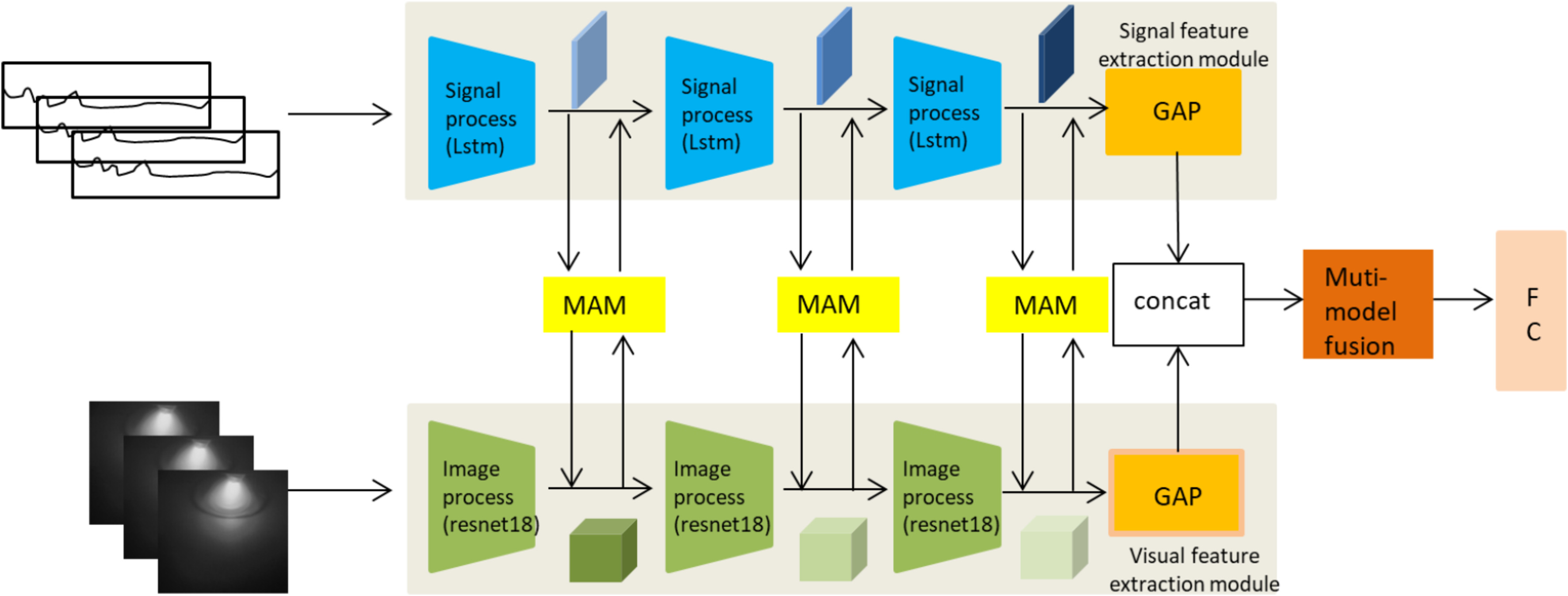
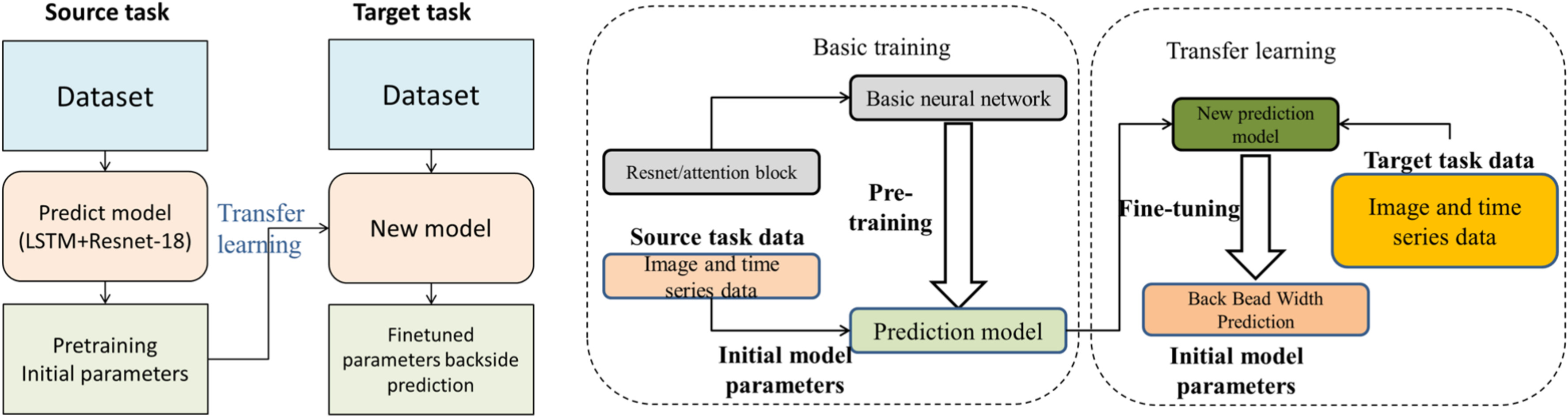
针对上述局限性,论文提出MSDF-TL(迁移学习与物理约束的多源异构数据融合框架) ,核心思路为将迁移学习、多源异构数据融合、物理约束三者深度整合,具体设计为:
采用ResNet18-LSTM混合架构实现时空特征的高效提取,ResNet18提取熔池图像的多尺度空间特征,LSTM建模传感器时序数据的时间演化特征;
设计双通道注意力机制+多头交叉注意力融合模块,实现图像与传感信号的跨模态特征融合,并引入自适应软注意力加权算法抑制多源数据的冗余信息,实现智能特征选择;
加入参数迁移机制,将预训练模型的参数迁移到MSDF-TL框架,通过源任务预训练+目标任务微调,减少训练时间、降低数据需求;
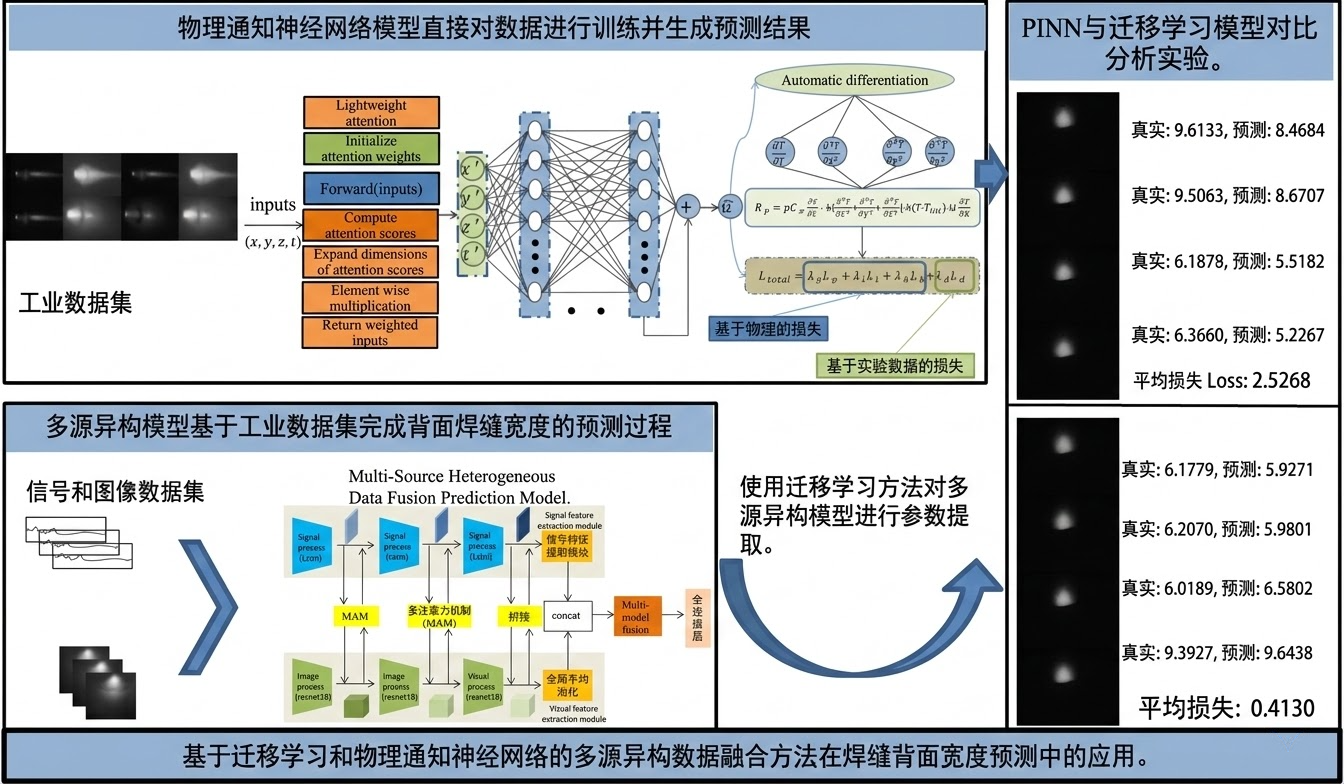
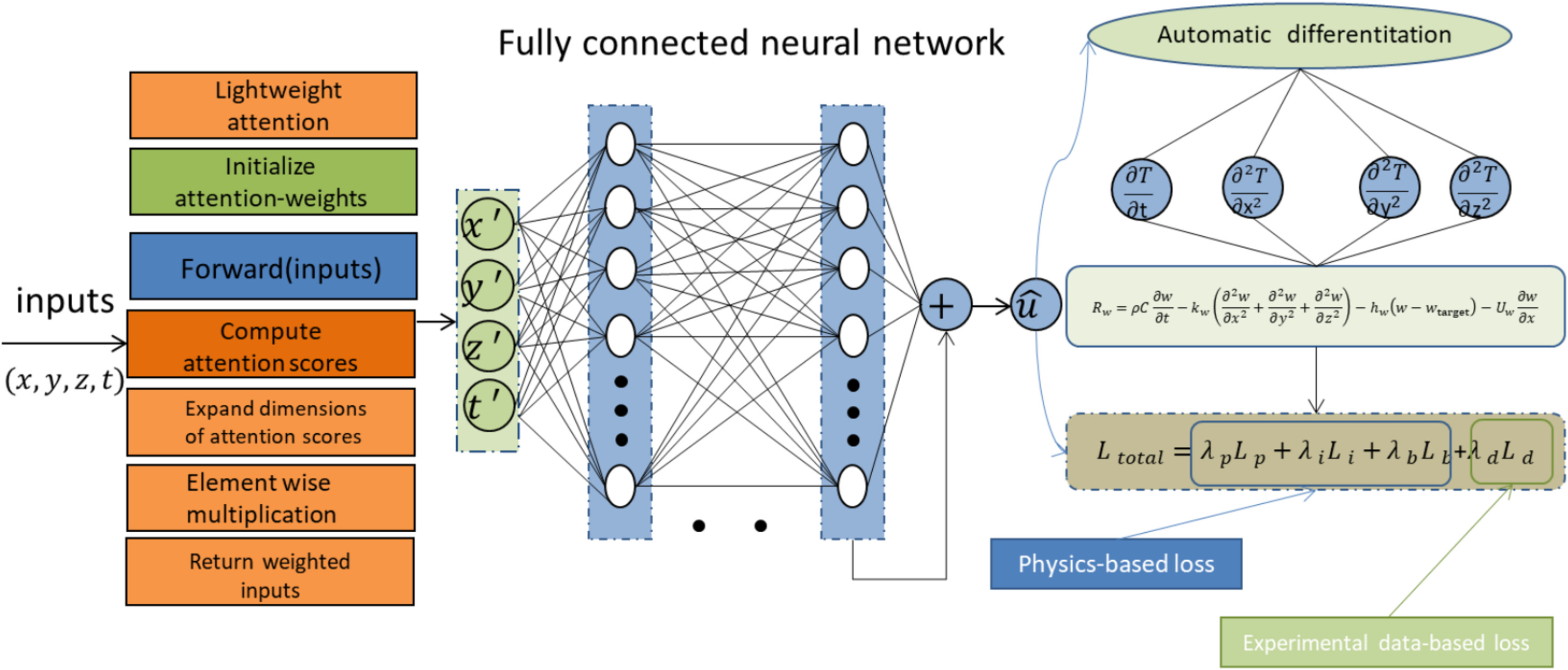
以物理约束的PINN模型为对比基线,通过架构设计隐式整合焊接过程的物理规律,在保证物理一致性的前提下,避免PINN复杂的偏微分方程(PDE)损失函数带来的计算负担。
(四)论文最终实现的核心效果与贡献
论文通过消融实验、对比实验验证了MSDF-TL框架的性能,核心量化效果与贡献如下:
预测精度显著提升:在背面熔宽预测任务中实现$R^2=0.9928$,MSE=0.4093、MAE=0.3837,相比PINN(平均损失2.5268)、传统多模态模型MFCA-Net(MSE=0.8993、MAE=0.6632)、多模态大模型InternVL3.5(MSE=0.5093、MAE=0.4877)均实现精度突破;
训练效率与泛化能力提升:迁移学习的参数复用与微调策略大幅减少了训练时间,模型在不同焊接参数下仍保持高预测精度,泛化能力显著优于传统方法;
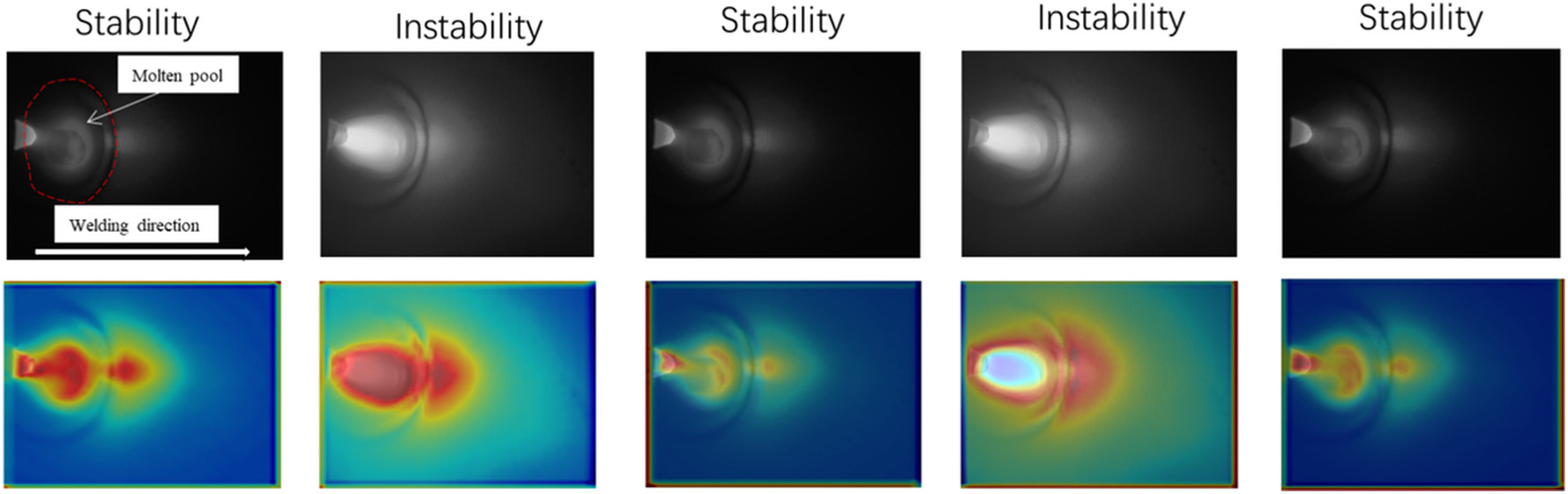
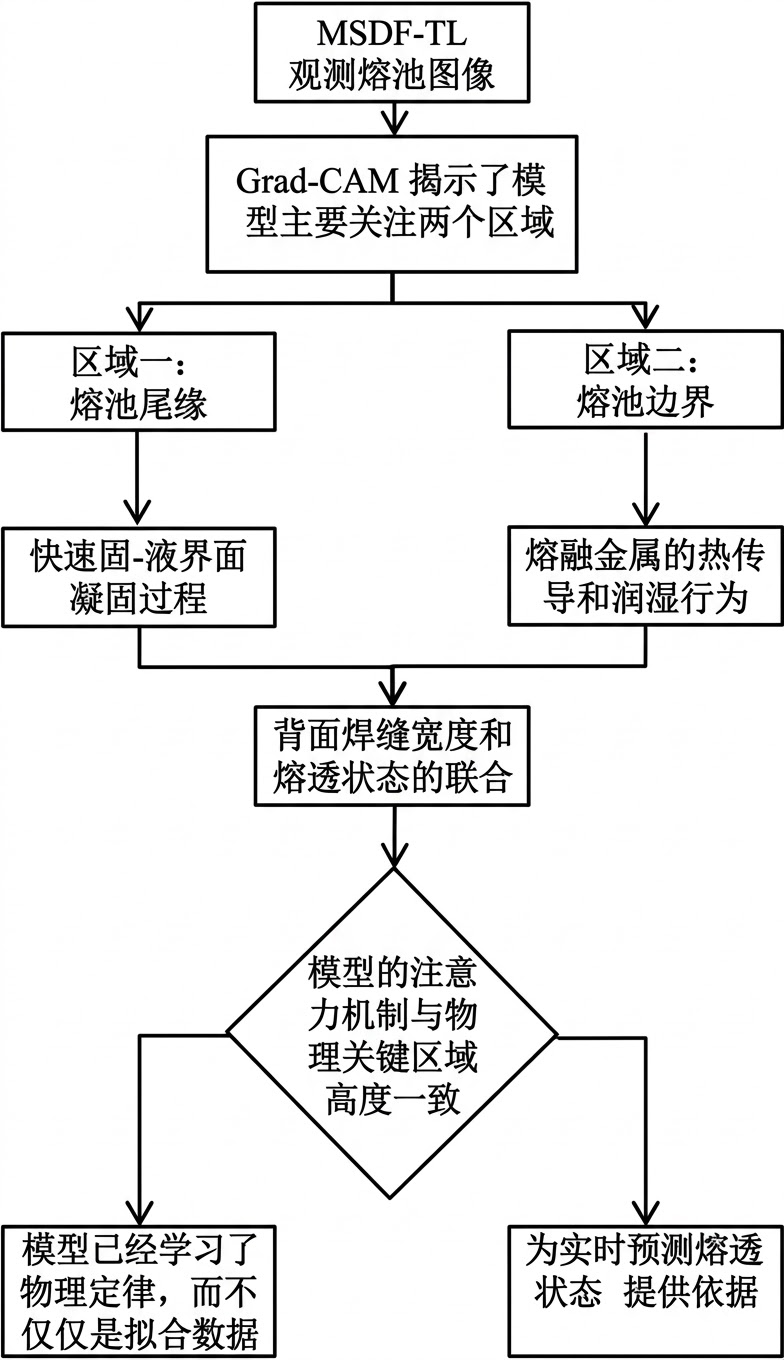
模型可解释性增强:通过Grad-CAM可视化技术验证了模型决策过程,发现模型可自主关注熔池边界、后缘等物理关键区域,决策逻辑与焊接物理机制高度契合;
工程应用价值突出:提出的轻量级框架适配工业端计算资源,部署可行性高,为GTAW焊接的实时质量监测与智能控制提供了可扩展的高精度解决方案,推动AI驱动模型在高端制造场景的落地。
二、核心技术方法拆解
本模块按实验平台与设计→核心实施步骤→关键技术细节的逻辑梳理论文方法论,全程聚焦“为什么这么做、怎么做、能得到什么结果”。
(一)实验平台与设计
论文的实验设计围绕 “多源数据采集的同步性、数据集标注的合理性、验证方案的严谨性” 展开,与同领域研究相比,突出了 “双相机同步成像+多参数变工况实验+多维度验证体系” 的设计思路,具体细节如下:
硬件架构设计
焊接平台:自动化GTAW焊接系统,包含爬壁式GTAW机器人、送丝机、水冷单元、机器人控制柜等,工件材料为DH36钢;
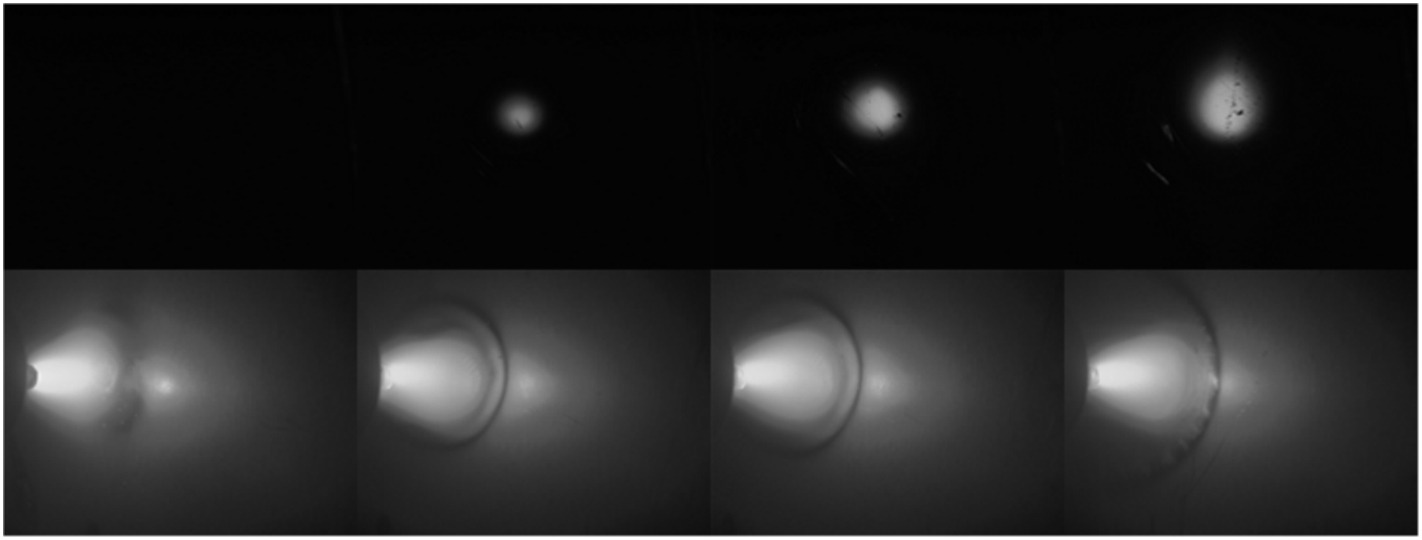
数据采集系统:双相机同步成像系统(60fps),正面相机经光学滤波抑制弧光和噪声,采集正面熔池图像,背面相机采集背面熔池图像作为标签标注依据;传感器采集焊接电流、电压等时序信号;
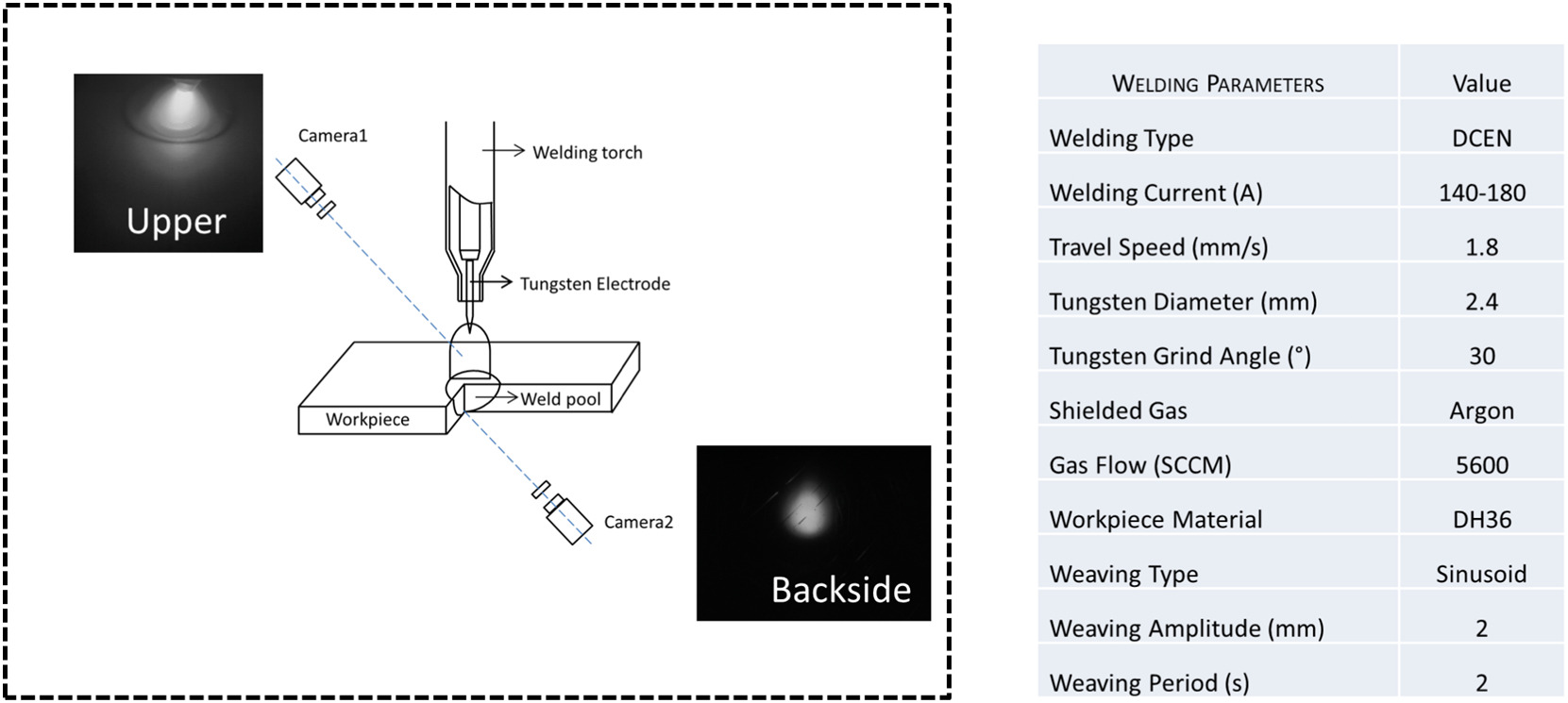
计算平台:NVIDIA Tesla T4 GPU,显存占用稳定在15.2-16GB,适配工业端的计算资源水平;
焊接参数:焊接类型为DCEN,钨极直径2.4mm、磨削角度30°,保护气体为氩气(流量5600 SCCM),焊接速度1.8/2mm/s,电流80-105A/140-180A(随机每2s变化,模拟实际生产的变工况场景)。
数据集构建与标签标注
数据采集:排除起弧瞬态后,共采集19040对同步的正面/背面熔池图像,配套对应的电流、电压时序信号;
数据划分:按8:2的比例随机分层划分为训练集(15232样本)和测试集(3808样本),保证样本在不同熔透状态(部分熔透、全熔透)的分布代表性;
标签标注:背面熔宽无法直接实时测量,通过背面图像二值化处理提取标签——将灰度值超过阈值的区域记为熔池区域,通过像素面积与熔宽的对应关系计算实际背面熔宽,阈值调整时像素面积同步适配,保证标签的一致性。
验证方案设计 论文设计了四维度验证体系,从模块有效性、模型对比、可解释性、预测精度四个方面验证MSDF-TL框架,保证实验结论的严谨性:
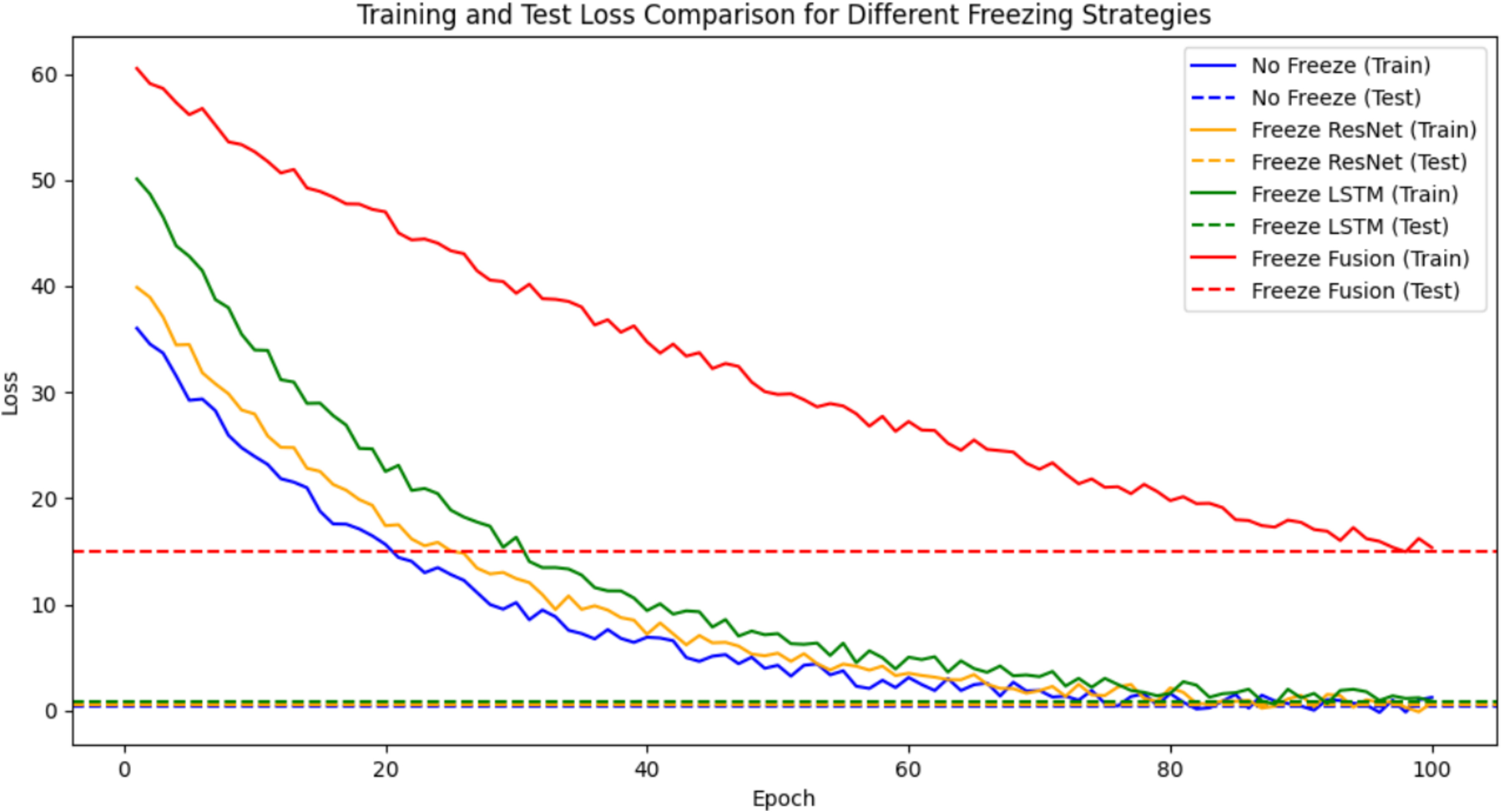
消融实验:通过层冻结实验验证ResNet18、LSTM、融合模块的核心作用,分析不同层冻结策略对模型损失的影响;
对比实验:将MSDF-TL与PINN、MFCA-Net、InternVL3.5对比,验证模型在MSE、MAE、$R^2$等指标上的优势;
可视化实验:通过Grad-CAM生成热力图,分析模型关注的熔池关键区域,验证模型决策与焊接物理机制的契合度;
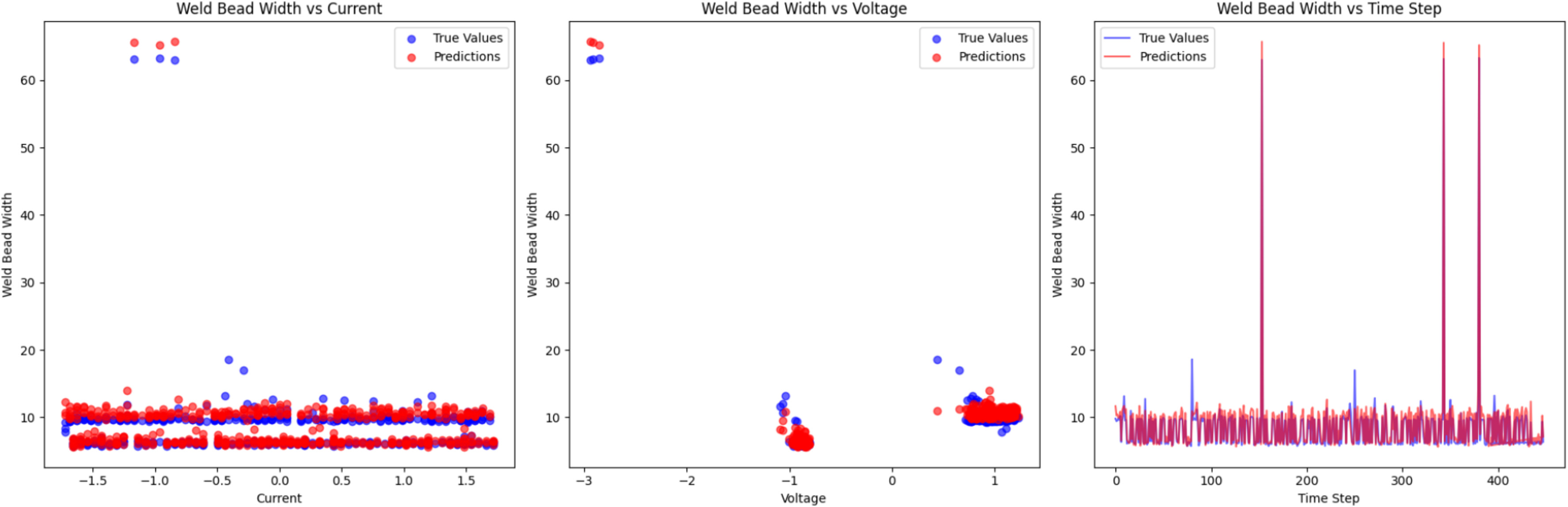
回归分析:对19040个数据点进行预测值与实际值的回归分析,通过$R^2$、回归斜率/截距验证模型的整体预测精度。
(二)核心实施步骤
论文将MSDF-TL框架的实施转化为六步闭环流程,每一步均有明确的解决目标,上下游逻辑关联紧密,形成“数据采集-预处理-模型训练-微调-验证-分析”的完整技术链路,具体步骤如下:
步骤1:变工况实验搭建与多源异构数据同步采集
解决目标:获取包含不同熔透状态的多源数据,模拟实际生产的复杂工况;
执行内容:搭建自动化GTAW焊接平台,设置变焊接电流、变焊接速度的实验条件,通过双相机同步采集正面/背面熔池图像,传感器同步采集电流、电压时序信号,保证图像与信号的时间戳对齐。步骤2:数据集预处理与标签标准化标注
解决目标:降低噪声干扰,保证输入数据的有效性和标签的准确性;
执行内容:对正面熔池图像进行光学滤波、去噪预处理;对背面熔池图像进行二值化处理,通过像素-熔宽对应关系计算实际背面熔宽,生成标准化标签;对时序信号进行归一化处理,消除量纲影响。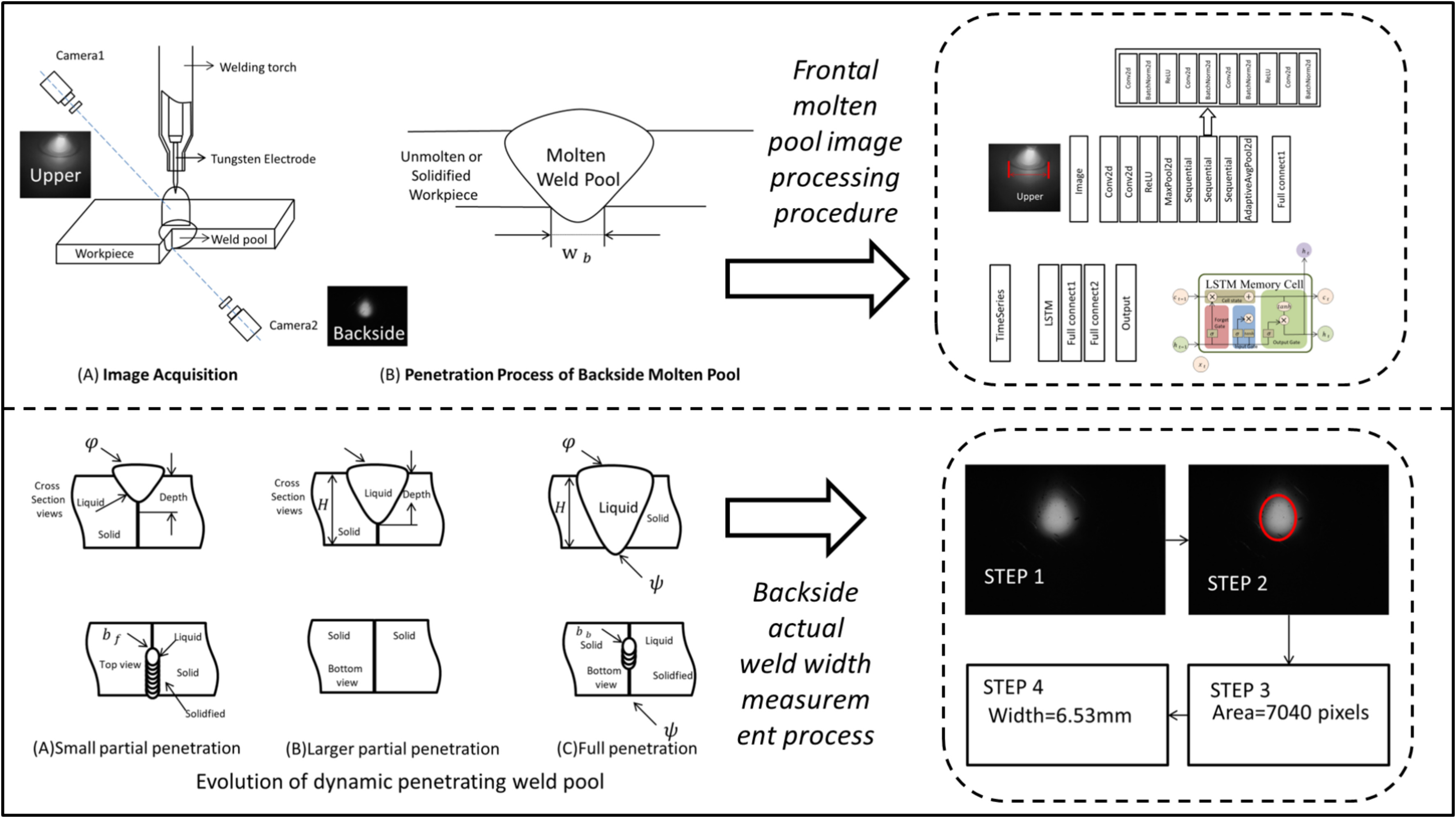
步骤3:源任务预训练,提取通用时空特征
解决目标:实现参数复用,降低目标任务的训练成本和数据需求;
执行内容:在大规模焊接通用数据集上预训练ResNet18-LSTM混合架构,ResNet18学习熔池图像的通用空间特征,LSTM学习传感信号的通用时间特征,优化模型初始参数,损失函数为MSE,优化器为Adam。步骤4:目标任务微调,迁移预训练参数至MSDF-TL框架
解决目标:将通用特征适配到具体的DH36钢GTAW焊接场景,实现跨模态特征融合;
执行内容:将预训练的ResNet18、LSTM参数迁移到MSDF-TL框架,加入多头交叉注意力融合模块和自适应软注意力加权算法,用实际焊接数据集对模型进行微调,实现图像与信号的跨模态特征融合,抑制数据冗余。
步骤5:MSDF-TL模型全流程训练与优化
解决目标:实现模型的收敛与参数优化,保证预测精度;
执行内容:设置超参数(批次32、学习率$1e^{-3}$、训练_epoch100),以MSE为损失函数、Adam为优化器,在NVIDIA Tesla T4平台上进行模型训练,实时监测训练/测试损失,确保模型收敛。步骤6:多维度模型验证与物理机制分析
解决目标:验证模型性能,分析模型决策的物理合理性,挖掘模型性能与焊接物理机制的关联;
执行内容:开展消融实验、对比实验、回归分析验证模型的精度和模块有效性;通过Grad-CAM可视化技术生成熔池热力图,结合焊接热传导、熔池流动的物理机制,分析模型关注的关键区域。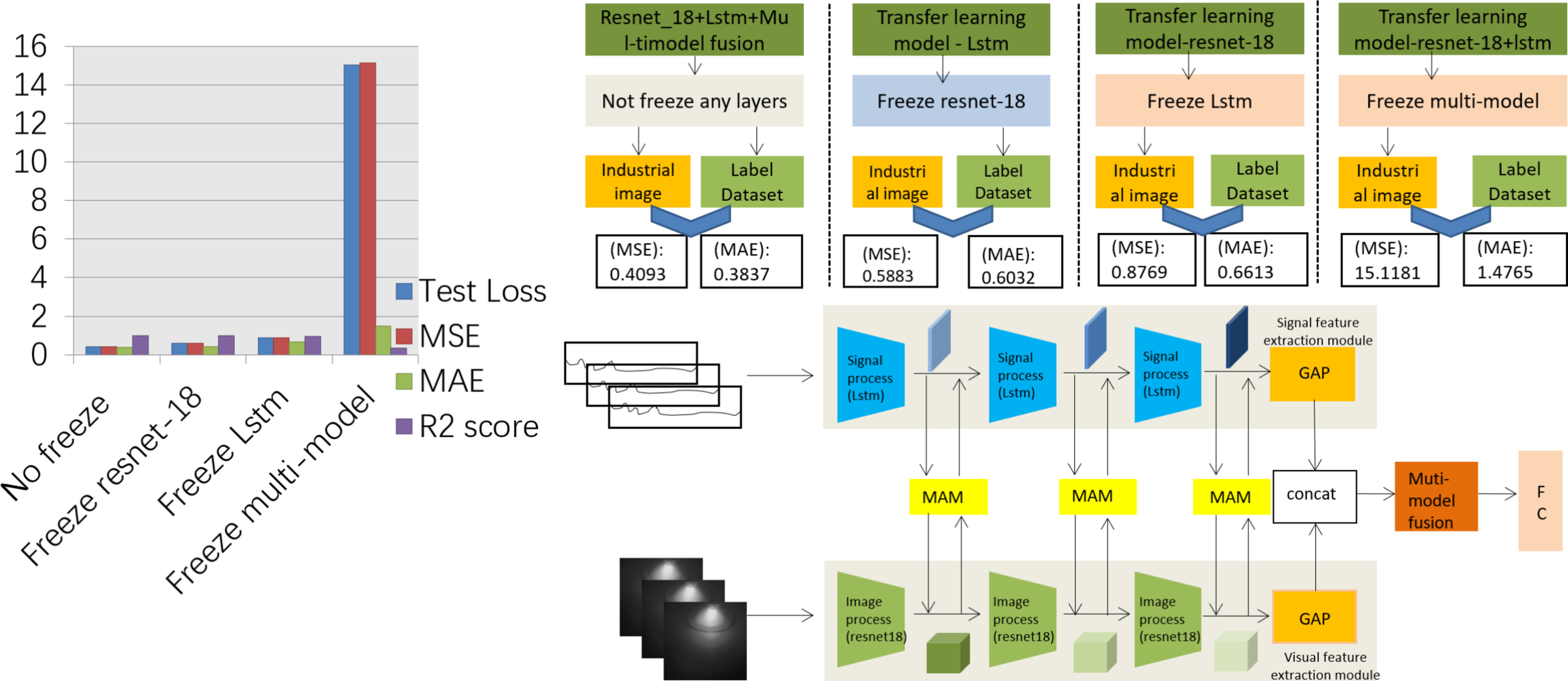
(三)关键技术细节
本部分深度拆解论文原文明确披露的可直接复用的核心技术细节,包括模型架构、核心模块、超参数、算法设计等,所有参数与设计规范均来自论文原文:
ResNet18-LSTM双分支特征提取架构
空间特征分支(ResNet18):针对熔池图像的多尺度特征需求,采用ResNet18提取正面熔池图像的局部形态细节、全局轮廓等空间特征,替代传统人工特征设计,避免经验限制带来的信息遗漏;
时间特征分支(LSTM):针对焊接电流、电压的时序演化特征,采用LSTM的门控机制捕捉时序信号的长时依赖关系,适配焊接过程的动态性,有效模拟熔池状态的时间演化。
多头交叉注意力融合模块(核心融合模块)
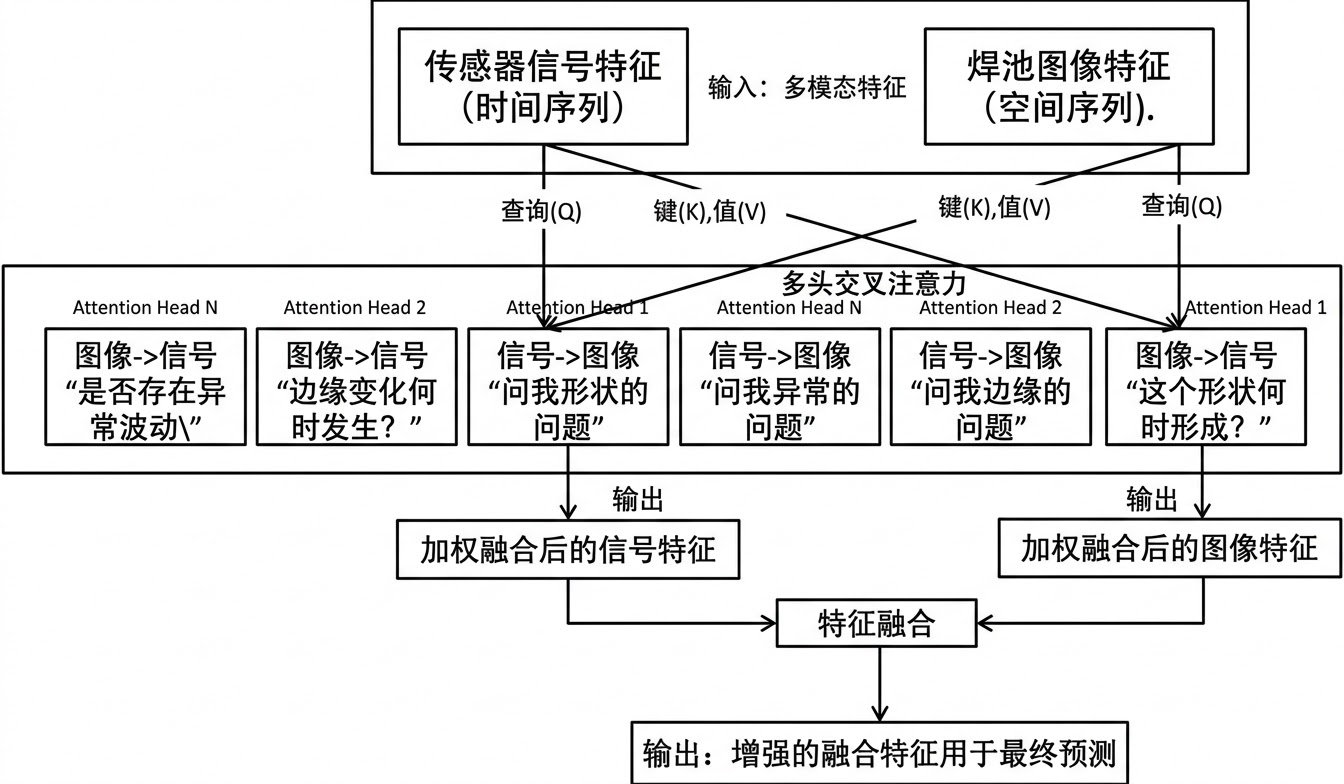
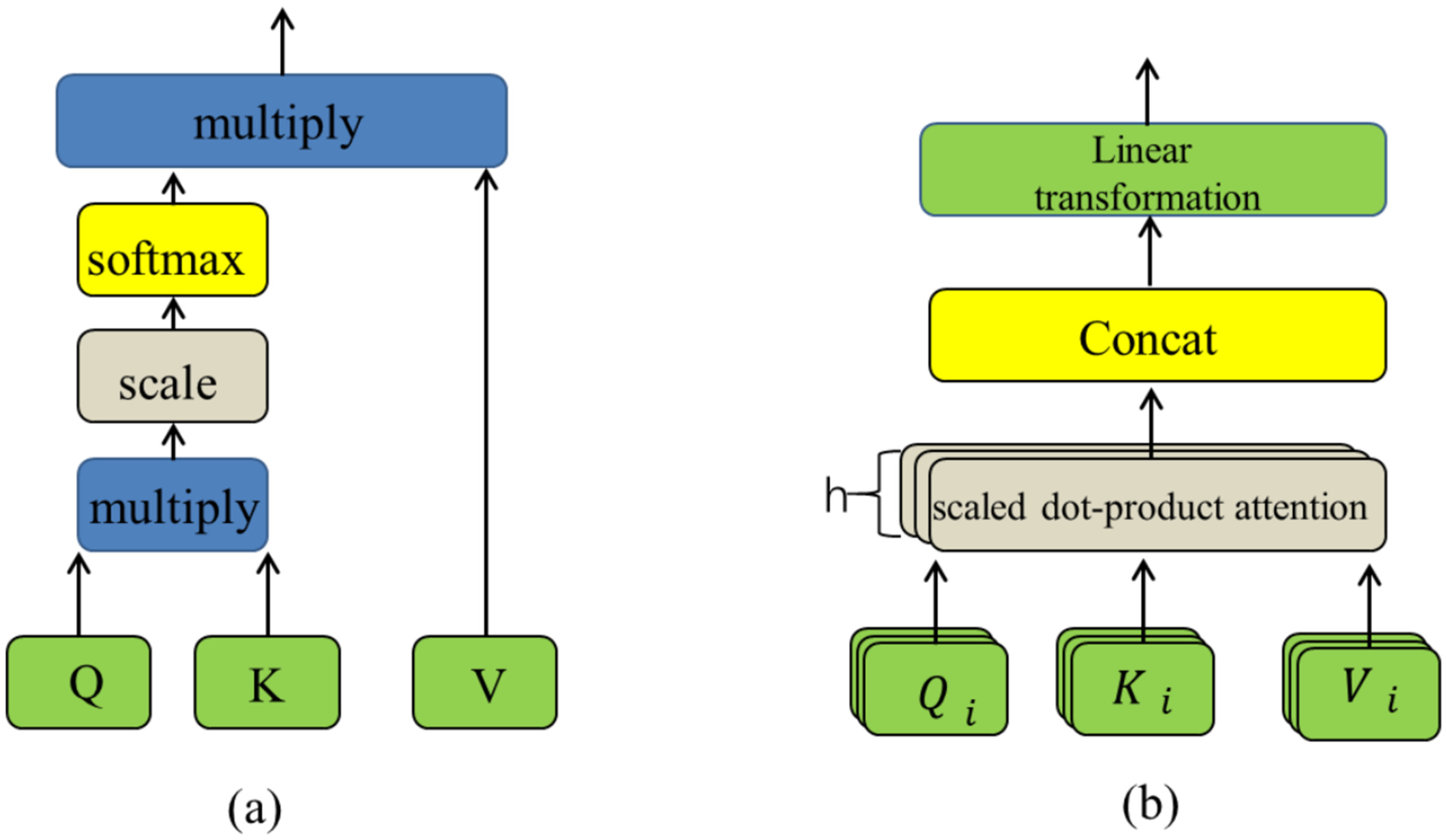
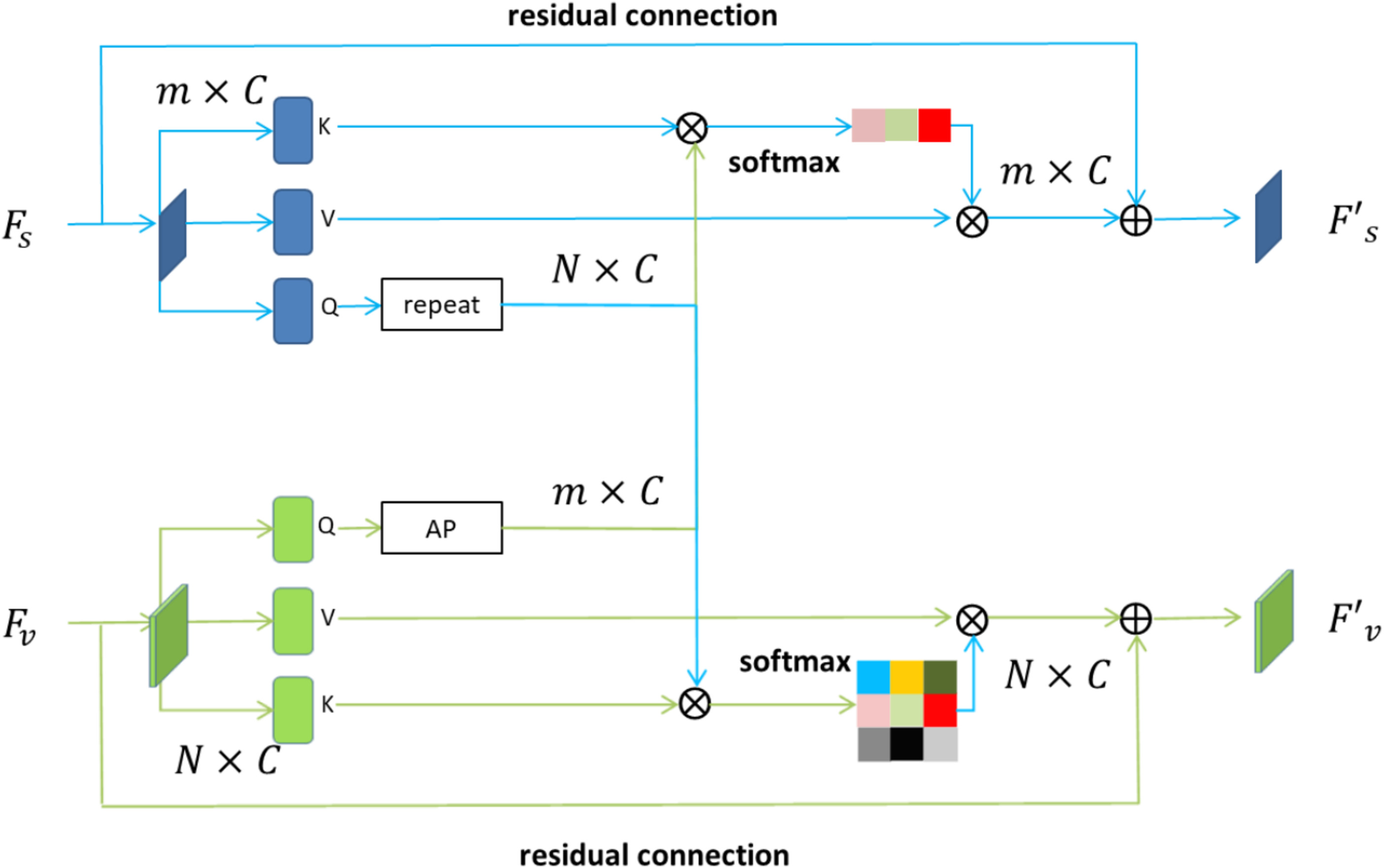
基于QKV注意力范式设计,是实现跨模态融合的核心,论文原文明确其三大设计要点:双向交叉查询:图像特征作为Query查询时序信号的Key/Value,提取与图像特征相关的时序信息;时序信号作为Query查询图像特征的Key/Value,提取与时序信号相关的图像信息,实现双模态的双向交互;
多头并行计算:将特征维度划分为多个子空间,每个注意力头独立捕捉不同粒度的跨模态依赖(如全局形态、局部细节、异常波动),头数可选4/8/16;
残差连接:将多头输出的特征拼接、变换后,与原始特征进行残差连接,生成融合后的增强特征,避免梯度消失,提升特征表达能力。
自适应软注意力加权算法 针对多源数据的冗余问题设计,通过动态生成注意力权重实现智能特征选择,对与背面熔宽高度相关的特征赋予高权重,对冗余/噪声特征赋予低权重,有效抑制多源数据的信息冗余,提升特征融合的有效性。
迁移学习的两阶段实施策略
源任务预训练:在大规模焊接通用数据集上训练ResNet18-LSTM架构,优化模型初始参数,学习通用的时空特征;
目标任务微调:将预训练参数迁移到MSDF-TL框架,冻结部分通用特征层,用小样本的实际焊接数据集对融合模块、输出层进行微调,适配具体焊接场景。
PINN对比模型的损失函数设计
为验证MSDF-TL的优势,论文设计了物理约束的PINN模型,其损失函数融合四类残差项,实现物理定律与实验数据的双重约束,核心公式为:
$$
_{total }=J_{p} L_{p}+J_{i} L_{i}+J_{b} L_{b}+J_{d} L_{d}
$$
其中,$L_p$为物理定律残差(热传导、对流等)、$L_i$为初始条件残差、$L_b$为边界条件残差、$L_d$为数据驱动残差,$J_p/J_i/J_b/J_d$为自适应权重,可根据焊接场景调整。
模型训练的核心超参数与优化策略 所有超参数均来自论文原文,为可复现的关键参数:
优化器:Adam,学习率$1e^{-3}$;
损失函数:均方误差(MSE);
批次大小(Batch Size):32;
训练轮数(Epoch):100;
硬件:NVIDIA Tesla T4 GPU,单卡训练,显存占用15.2-16GB。
Grad-CAM可视化技术的应用细节 通过生成熔池图像的热力图,红色区域为模型最高关注区域,黄色为次关注区域,蓝色为低关注区域,论文通过该技术验证了模型自主关注熔池边界、后缘等物理关键区域,决策逻辑与焊接物理机制高度契合。
三、学术创新与研究价值
本模块分差异化学术创新、研究价值两部分展开,差异化学术创新严格基于论文原文的对比研究(PINN、MFCA-Net、InternVL3.5),对应现有研究局限性拆解核心突破;研究价值从学术理论补全、实际落地潜力两个维度展开,所有内容均以论文原文的量化结果为支撑,不主观夸大。
(一)差异化学术创新
论文原文将MSDF-TL与PINN、传统多模态模型(MFCA-Net)、多模态大模型(InternVL3.5) 进行定向对比,针对现有研究的三大核心局限性实现差异化突破,每个创新点均对应一个未解决的关键问题,具体如下:
突破PINN“高计算成本、低实时性、物理约束与效率难以兼顾”的局限:提出 “迁移学习+隐式物理约束” 的设计思路,替代PINN复杂的PDE损失函数。通过源任务预训练+目标任务微调,将PINN的平均损失从2.5268降至0.4130,大幅减少训练时间和计算成本;同时通过架构设计隐式整合焊接的热传导、熔池流动等物理规律,保证模型输出的物理一致性,解决了PINN“物理可解释性与计算效率不可兼得”的问题。
突破传统多模态模型(如MFCA-Net)“仅关注模态内交互、缺乏细粒度跨模态融合”的局限:设计多头交叉注意力融合模块+自适应软注意力加权算法,替代传统的特征拼接/后融合方法。MFCA-Net仅关注视觉模态内的通道注意力,而MSDF-TL实现了图像与时序信号的双向交叉模态交互,并通过自适应权重抑制冗余,将MSE从0.8993降至0.4093,解决了多源数据融合“冗余信息抵消传感器优势”的问题。
突破单源数据模型“泛化能力差”、多模态大模型(InternVL3.5)“数据需求大、部署难度高”的局限:提出ResNet18-LSTM双分支轻量级架构+两阶段迁移学习,ResNet18-LSTM实现时空特征的高效提取,迁移学习将数据需求降至中低水平,相比InternVL3.5的“海量数据+超高计算资源需求”,MSDF-TL的轻量级架构适配工业端的NVIDIA Tesla T4等硬件,部署可行性大幅提升,同时实现$R^2=0.9928$的预测精度,优于InternVL3.5($R^2$未披露,MSE=0.5093)。
(二)研究价值
1. 学术理论补全
补全了智能焊接领域 “物理约束-迁移学习-多源数据融合” 的一体化框架研究空白,首次将多头交叉注意力融合机制应用于焊接熔池的时空特征融合,为非线性多物理场耦合的制造过程建模提供了新的理论思路;
验证了迁移学习在焊接领域小样本场景下的有效性,为解决PINN“实时性差、数据饥饿”的问题提供了可行的技术路径,丰富了物理信息深度学习在制造领域的应用范式;
建立了 “深度学习可视化+焊接物理机制” 的分析方法,通过Grad-CAM热力图将模型的黑箱决策过程与焊接的热传导、熔池流动物理机制关联,为工业智能模型的可解释性研究提供了新的分析思路。
2. 实际落地潜力
高精度实时预测:$R^2=0.9928$的背面熔宽预测精度可满足工业高精度焊接的质量监测需求,迁移学习带来的训练效率提升保证了模型的实时性,可直接应用于GTAW焊接的在线质量监测;
轻量级易部署:模型基于ResNet18-LSTM的轻量级架构设计,可在NVIDIA Tesla T4等工业端通用GPU上运行,显存占用仅15.2-16GB,相比InternVL3.5等大模型,部署成本大幅降低,适配汽车制造、压力容器生产等工业场景;
可解释性适配工业需求:Grad-CAM可视化技术让模型的决策过程可追溯,符合工业生产对智能模型“透明度、可解释性”的要求,避免纯黑箱模型在工业应用中的信任问题;
可扩展性强:框架的模块化设计(特征提取、融合、迁移学习)可灵活适配不同的焊接材料、工艺,仅需微调对应模块即可拓展至激光焊接、搅拌摩擦焊等其他焊接工艺,具备规模化工业应用的潜力。
四、研究启发与缺口挖掘
本模块分可复用技术与思路、研究缺口与切入思路两部分展开,可复用内容均为论文原文明确披露的、可直接迁移的方法/框架;研究缺口优先基于论文原文的未来展望,未提及部分基于论文的研究边界(验证场景、数据集范围、模型适用条件)合理推导,每个缺口配套可执行的切入思路,拒绝空泛描述。
(一)可复用技术与思路
从论文的模型设计、实验方法、分析思路中提炼4类可直接迁移的内容,明确适配场景、复用方式与注意事项,均基于论文原文披露信息:
ResNet18-LSTM双分支时空特征提取方法
适配场景:同时包含视觉图像+时序传感器数据的制造过程状态预测(如激光焊接、3D打印、注塑成型的质量监测);
复用方式:根据具体场景替换特征提取网络(如将ResNet18替换为MobileNet用于轻量化场景,将LSTM替换为BiLSTM/GRU用于更复杂的时序依赖捕捉);
注意事项:保证图像与时序信号的时间戳对齐,避免数据不同步带来的特征提取误差。
多头交叉注意力融合模块的QKV范式设计
适配场景:多源异构数据(图像+时序信号/红外+声学信号) 的融合任务,尤其适用于存在数据冗余的制造场景;
复用方式:直接复用“双向交叉查询+多头并行计算+残差连接”的设计思路,根据数据模态调整注意力头数和特征维度;
注意事项:配合自适应软注意力加权算法使用,抑制多源数据的冗余信息,提升融合效果。
迁移学习的两阶段实施策略(源任务预训练+目标任务微调)
适配场景:制造领域小样本、高成本数据采集的研究场景(如高端装备焊接、精密成型,数据采集易造成工件损耗);
复用方式:构建通用的制造工艺源数据集,预训练基础特征提取模型,针对具体工艺/材料仅需小样本数据集微调融合模块和输出层;
注意事项:源任务与目标任务需保证一定的物理相似性(如同为焊接工艺),避免跨域迁移的特征偏移。
Grad-CAM可视化+物理机制的模型分析方法
适配场景:需要可解释性的工业智能模型研究,验证深度学习模型的决策合理性;
复用方式:通过Grad-CAM生成关注区域热力图,将热力图与工艺的核心物理机制(如熔池流动、热传导、材料相变)关联,验证模型是否关注物理关键区域;
注意事项:需结合工艺的专业知识分析热力图,避免单纯的可视化无物理意义。
(二)研究缺口与切入思路
论文原文在结论部分指出未来可从模型架构优化、特征融合策略改进、工业应用拓展方向深入研究,结合论文的研究边界(仅验证DH36钢GTAW焊接、未测试高速焊接场景等),挖掘4类具体研究缺口,并配套可执行的切入思路:
研究缺口:模型仅在DH36钢的GTAW焊接中验证,未适配其他焊接材料(如不锈钢、铝合金)和焊接工艺(如激光焊接、MAG焊接),材料/工艺的差异性会导致熔池物理特性变化,模型泛化能力可能下降。
切入思路:构建多材料、多工艺的焊接数据集(DH36钢、不锈钢、铝合金;GTAW、激光焊接、MAG焊接),对MSDF-TL框架进行跨域迁移学习优化,在特征提取层加入材料属性、工艺参数的特征嵌入模块,提升模型对不同材料/工艺的适配性。研究缺口:模型的实时性仅通过训练效率提升验证,未在工业实际的高速焊接场景(如焊接速度>5mm/s)中测试,高动态场景下的特征提取延迟、预测延迟未评估,难以满足高速焊接的实时监测需求。
切入思路:对MSDF-TL框架进行轻量化改进(模型剪枝、量化、知识蒸馏),结合边缘计算硬件(如Jetson Xavier),搭建高速焊接实验平台,测试模型在焊接速度5-10mm/s下的预测延迟和精度,优化特征提取模块的实时性。研究缺口:多源数据仅整合了熔池图像和电流/电压时序信号,未纳入红外热成像、声学信号等其他关键传感数据,数据维度的局限性可能导致极端工况(如弧光强干扰、材料杂质、保护气体流量异常)下的预测鲁棒性下降。
切入思路:拓展多源传感数据维度,加入红外热成像(熔池温度分布)、声学信号(焊接弧声特征),优化多头交叉注意力融合模块的特征维度适配能力,设计多模态特征的分层融合策略,提升模型在极端工况下的鲁棒性。研究缺口:模型的物理约束仅通过架构设计隐式整合,未与焊接过程的精细化多物理场仿真(如熔池流动、热传导、金属相变的耦合仿真)深度耦合,模型的物理可解释性和预测精度仍有提升空间。
切入思路:将精细化的焊接多物理场仿真数据融入源任务预训练,在MSDF-TL框架中加入物理特征约束层,将仿真得到的熔池温度、流速等物理特征作为约束,实现数据驱动与物理仿真的深度融合,提升模型的物理可解释性和预测精度。
五、论文完整逻辑链梳理
本文严格基于论文原文,梳理论文 “提出问题→分析问题→设计方案→实验验证→得出结论” 的完整研究逻辑链,还原作者的科研思路与写作逻辑: 论文首先针对GTAW自动化焊接中背面熔宽实时监测难、传统方法精度/效率不足的行业与学术痛点,梳理了PINNs、深度学习、多源数据融合三类主流研究的进展,并指出其核心局限性:PINNs训练成本高、实时性差;传统多模态模型缺乏细粒度跨模态融合;人工特征提取易遗漏关键信息。随后基于 “物理约束-迁移学习-多源数据融合” 的核心思路,设计了MSDF-TL轻量级框架,采用ResNet18-LSTM双分支架构提取熔池图像的空间特征和传感信号的时间特征,通过多头交叉注意力融合模块+自适应软注意力加权算法实现跨模态特征融合,引入两阶段迁移学习解决模型数据饥饿和训练效率问题,同时设计物理约束的PINN模型作为对比基线,通过架构设计隐式整合焊接物理规律。接着搭建了变工况自动化GTAW焊接实验平台,采集19040对熔池图像和配套时序信号,构建标准化数据集,设计消融实验、对比实验、可视化实验、回归分析的四维度验证体系,验证MSDF-TL框架的模块有效性、预测精度、可解释性。实验结果表明,MSDF-TL在背面熔宽预测中实现$R^2=0.9928$的高精度,MSE、MAE均显著优于PINN、MFCA-Net、InternVL3.5等对比模型,迁移学习大幅提升了训练效率,Grad-CAM可视化验证了模型决策与焊接物理机制的高度契合。最后论文得出结论:MSDF-TL框架有效融合了迁移学习与多源异构数据融合,在焊接状态预测中实现了精度、效率、可解释性的三重提升,为智能焊接过程控制提供了可扩展的高精度解决方案;并指出未来可从模型架构轻量化、特征融合策略优化、多材料/多工艺适配、物理仿真与数据驱动深度融合等方向深入研究。
【个人思考衔接】
▢ 对论文方法的疑问与验证思路:
▢ 可直接复用在自身课题的内容:
▢ 拟拓展的研究方向: